پروژه کنترل دور و جهت موتور dc توسط stm32 و بلوتوث و اندروید

به نام خدا و با سلام خدمت همه دوستان
در این مطلب قصد دارم پروژه کنترل دور موتور dc توسط میکروکنترلر stm32 رو معرفی کنم
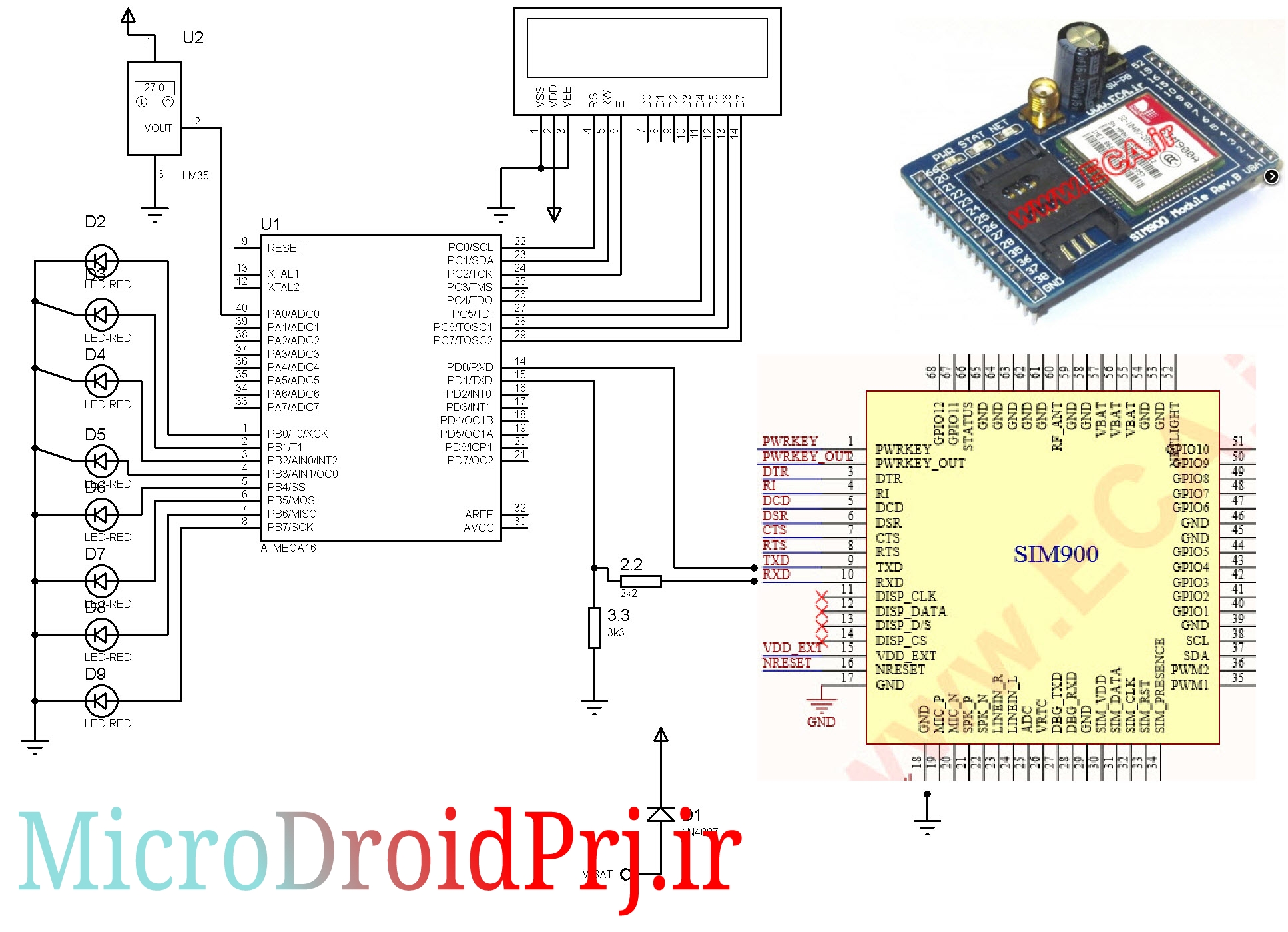
برای کنترل دور موتور dc از درایور l298 استفاده شده است.
میکروی مورد نظر stm32f103 است.
کامپایلر و ide برنامه نویسی مورد استفاده keil , stm32cubemx است.
جهت ارتباط م میکرو با اندروید از ماژول بلوتوث استفاده شده است.
روی پروژه یک lcd کاراکتری قرار دارد که جهت موتور و مقدار دور بر حسب دیوتی سایکل موج pwm را نمایش می دهد.
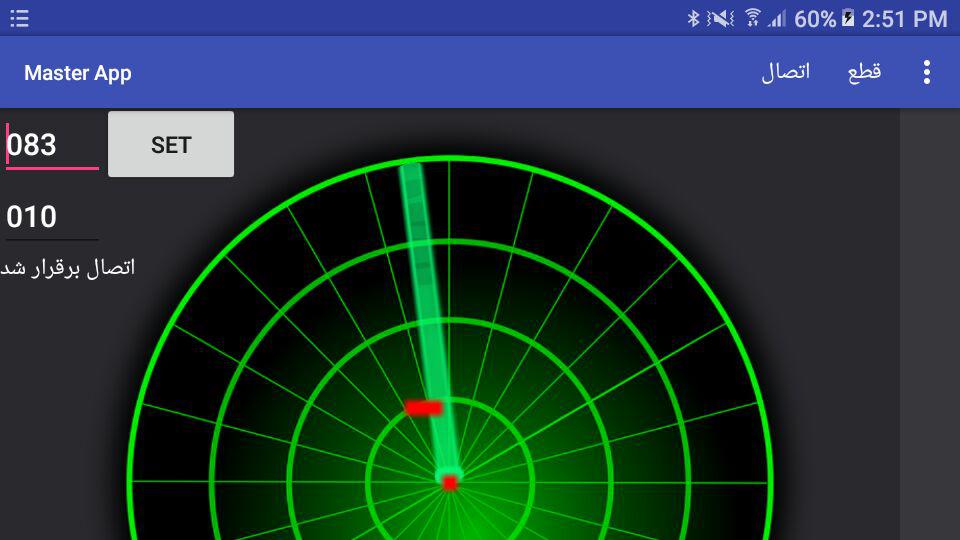
برنامه اندرویدی به زبان جاوا در اندروید استدیو نوشته شده است و قابلیت کنترل دور موتور با ترک بار و همچنین چپ و راست و استاپ و نمایش لاگ را نیز دارد.
پروژه روی برد بورد بسته شده است و از هدربورد arm استفاده شده در صورت نیاز میتوانید برای سفارش pcb به تلگرامم پیام بدید.
برای این پروژه من چون از ماژول درایور l298 استفاده کردم روی ماژول یک رگولاتور ۷۸۰۵ هم قرار دارد که میتوان از ۵ ولت ان برای تغذیه هدر برد و ماژول بلوتوث استفاده کرد (روی هدر بردarm و هدر برد ماژول بلوتوث رگولاتور ۳٫۳ ولتی قرار دارد)
شما به روش های دیگه هم میتونید این تغذیه رو تامین کنید فقط گراند های کل تغذیه ها یکی باشه و حتما از خازن ۱۰۰ میکرو فارادی هم موازی با تغذیه میکرو استفاده کنید تا نویز ها رفع بشن.
تصاویر برنامه اندرویدی به صورت زیر است:


تصاویر سخت افزار نیز به صورت زیر است:

این پروژه تنظیمات آن در کیوب انجام شده است و به راحتی میتوانید تنظیمات آن را تغییر دهید.

نحوه عملکرد پروژه را نیز ویدئو زیر میتوانبد ببینید:
میتوانید پروژه را از لینک زیر دانلود کنید: